








隨著世界各國對海洋權(quán)益的日益重視,海軍裝備中反潛反水雷裝備也逐步向現(xiàn)代化、低成本和低傷亡方向發(fā)展,因此,水下無人作戰(zhàn)系統(tǒng)成為世界各國軍事裝備研發(fā)的重點(diǎn),并逐步向深海領(lǐng)域延伸發(fā)展。由于深海AUV水下機(jī)器人在深水中作業(yè)需要承受高水壓,且深海水下的地形、水文環(huán)境等非常復(fù)雜,許多關(guān)鍵技術(shù)需要突破,深海AUV水下機(jī)器人則成為該領(lǐng)域的發(fā)展熱點(diǎn)。深海AUV水下機(jī)器人是深海水下無人航行器,其主要任務(wù)包括深海探測、目標(biāo)識別、深海反制等。
深海AUV水下機(jī)器人在研制和使用上與淺海AUV水下機(jī)器人有顯著不同。在結(jié)構(gòu)方面,既考慮耐壓艙承壓還要考慮艙體受壓后的形變產(chǎn)生的密封性下降而發(fā)生漏水風(fēng)險;在總體平衡方面,隨著下潛的深度加大,海水密度隨之發(fā)生很大變化影響了AUV水下機(jī)器人的浮力,使其受力不平衡,這需要在設(shè)計(jì)過程中充分考慮浮力調(diào)節(jié)的問題;在導(dǎo)航定位方面,潛入深海的AUV水下機(jī)器人無法采用傳統(tǒng)方式校準(zhǔn)慣導(dǎo),需要采用新方式實(shí)現(xiàn)該功能。由此可見,深海AUV水下機(jī)器人與淺海AUV水下機(jī)器人相比有諸多自身的特點(diǎn)。
一、深海AUV的發(fā)展現(xiàn)狀及特點(diǎn)
1國內(nèi)外發(fā)展現(xiàn)狀
隨著海洋工程技術(shù)的發(fā)展,深海AUV的許多關(guān)鍵技術(shù)不斷突破,許多國家都在研究自己的深海AUV水下機(jī)器人用于軍事或者民用,初步估計(jì)全世界已有十幾種不同類型的深海AUV水下機(jī)器人。例如法國的ECA公司,美國的Hydroid公司,金槍魚機(jī)器人公司,挪威的HUGIN系列等,均深入研究并成功開發(fā)出深海AUV水下機(jī)器人,國內(nèi)也有許多科研院校在深入研究深海AUV水下機(jī)器人。因此,當(dāng)前包括中國在內(nèi)的各個國家對深海AUV水下機(jī)器人非常重視,深海AUV水下機(jī)器人的應(yīng)用領(lǐng)域也越來越廣闊。
2國內(nèi)外深海AUV的發(fā)展?fàn)顩r
⑴ REMUS6000
REMUS6000自主無人水下航行器是Hydroid公司的系列產(chǎn)品中工作深度最大的AUV水下機(jī)器人。其外形及相關(guān)組成如下圖所示。

▲REMUS6000外形圖
由于REMUS6000自主水下無人水下航行器自主海底跟蹤航行,可攜帶有效載荷,最大6000m水深作業(yè),以測量海水的特性,包括電導(dǎo)率、溫度、化學(xué)成分,并且通過測深、聲吶側(cè)掃、磁學(xué)、重力學(xué)以及照相術(shù)繪制成像海底。REMUS6000自主水下無人水下航行器的基本形式包括航行器、測深儀、側(cè)掃和沉積層穿透聲吶、導(dǎo)航裝置和通信裝置以及其他相關(guān)設(shè)備。
REMUS6000自主水下無人水下航行器也可根據(jù)用戶需求配置專用傳感器,以適應(yīng)特殊要求。REMUS6000的主要參數(shù)如下:航行器直徑71cm,航行器長度3.96m,航行器空氣中重量862kg,最大工作深度6000m,續(xù)航力22h(典型速度),航速最大4.5kn。
⑵ Bluefin-21
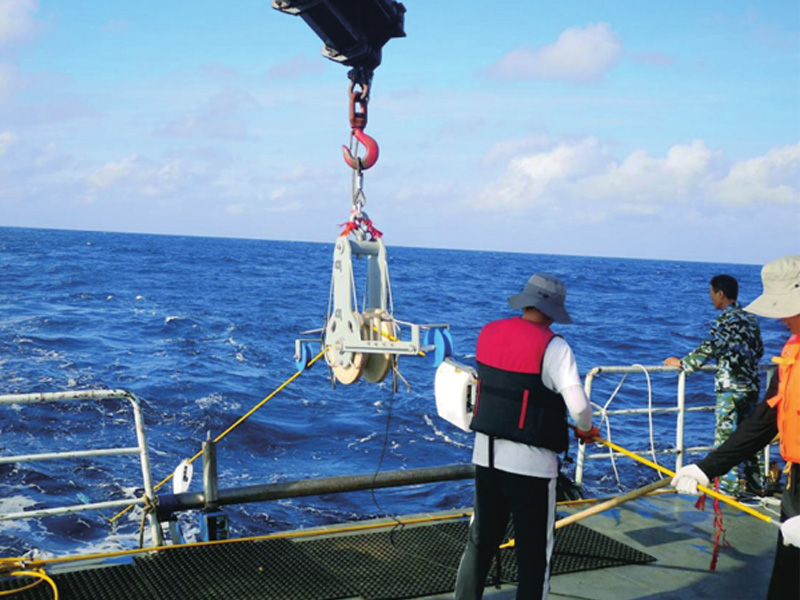
金槍魚機(jī)器人公司是美國一家知名的自主無人水下航行器的設(shè)計(jì)和制造商,該公司推出的無人水下航行器包括小型的Bluefin-9、中型的Bluefin-12、大型的Bluefin-21。Bluefin-21是一種高度模塊化的自主無人水下航行器,可以攜帶多種傳感器和有效載荷。其電源容量大,即使在最大水深也可長期工作,并可由各種應(yīng)急船舶操作使用。自由更換模塊--無人水下航行器的設(shè)計(jì)包括可在使命現(xiàn)場更換的有效載荷段和電池模塊,各種子系統(tǒng)均可接觸,以便加快周轉(zhuǎn)時間,并允許在現(xiàn)場維修,從而加速作業(yè)速度。其外形如下圖所示。

▲Bluefin-21布放入水
Bluefin-21的主要用途是近海勘測、搜索和救撈、反水雷、未爆武器處理、海洋學(xué)考察以及考古和探測。該型AUV主要技術(shù)參數(shù)有:航行器直徑533mm,長度4390mm,空氣中質(zhì)量750kg,最大工作深度4500m;續(xù)航力:標(biāo)準(zhǔn)有效載荷3kn時為25h;航速4.5kn;傳感器:側(cè)掃聲吶、淺層海底剖面儀以及多波束回聲測深儀。

⑶ HUGIN系列AUV水下機(jī)器人
挪威的HUGIN系列自主水下航行器在21世紀(jì)問世以來, 從原型AUV水下機(jī)器人, 逐步發(fā)展了HUGIN1000、3000、4500以及HUGIN?MR等型AUV。HUGIN 4500型AUV外形如下圖。
HUGIN 4500 AUV是HUGIN系列中最大的,航行器的結(jié)構(gòu)形式與該系列中的其他航行器相同,只不過體積更大、質(zhì)量更重,主要不同之處在于采用了功率更大的半燃料電池, 容量比HUGIN 3000 AUV多30%。航行器的尺寸和電池容量允許航行器攜帶工作能力更強(qiáng)的傳感器,例如高分辨率淺層海底剖面儀和側(cè)掃聲吶。目前,HUGIN 4500 AUV只作為美國C&C技術(shù)公司的“勘測者Ⅲ” 使用, 最大工作水深4500m。HUGIN 4500 AUV主要參數(shù)有:航行器直徑1000mm;長度6400mm;空氣中重量1500kg;最大工作深度4500m;傳感器側(cè)掃聲吶,工作頻率為230kHz或410kHz,作用距離225m,分辨率7m以及工作頻率為1~6kHz的淺層海底剖面儀。航行器上還可安裝攝像機(jī)系統(tǒng)、多波束測深系統(tǒng)、CTD、深度傳感器、多普勒計(jì)程儀、超短基線水聲定位系統(tǒng)、水聲數(shù)據(jù)調(diào)制解調(diào)器。
目前挪威海軍擁有2套休金4500 AUV系統(tǒng),用于反水雷和環(huán)快速評估,配用HISAS 1030高分辨率合成孔徑聲吶,以3.5knn 航速在400m水深工作,每小時可探測2700km2,續(xù)航力17h,利用側(cè)掃聲吶的續(xù)航力為24h,兩次使命之間的維護(hù)保養(yǎng)時間為1h。
⑷ 探索者級AUV水下機(jī)器人
加拿大ISE公司的AUV長約4.5m, 直徑0.69m載負(fù)載的不同,其空氣中重量在580~800kg之間,其最大潛深為3000m。其巡航速度在1~5kn之間,在AUV的負(fù)載段可攜帶各種不同的負(fù)載。1.1m長的可伸縮通信天線,此天線有助于任務(wù)的再規(guī)劃并且可以增加母船和航行器之間的通信距離。殼體包括1個7075-T6的鋁質(zhì)圓柱段和2個7075-T6型的鋁質(zhì)端部封蓋,內(nèi)部可使用的直徑為61cm,長度為159.5cm。端部封蓋利用鋁質(zhì)夾緊裝置與圓柱體連接起來。自由進(jìn)水分段采用玻璃鋼制造。航行器續(xù)航力:120km@3kn。配置的傳感器:多普勒計(jì)程儀、深度傳感器、高度計(jì)、固定在桅桿上的GPS天線和超短基線應(yīng)答器作為定位裝置、導(dǎo)航裝置、無線電通信和銥星通信系統(tǒng)。此外,應(yīng)急設(shè)備包括應(yīng)答器、定位器、閃光燈和射頻無線電信標(biāo)。

▲探索者AUV回收
⑸ CR-2型深海AUV水下機(jī)器人
該型深海AUV由沈陽自動化研究所研制,可用于深海水下資源調(diào)查,海洋環(huán)境調(diào)查等,主要參數(shù)有:最大作業(yè)深度6000m,水下最大航速2kn,續(xù)航力10h,直徑800mm,長度4.5m, 重量1500kg。根據(jù)任務(wù)要求, 潛航體搭載了水下相機(jī),側(cè)掃聲吶,淺剖儀等探測設(shè)備。

▲CR-2型外形圖
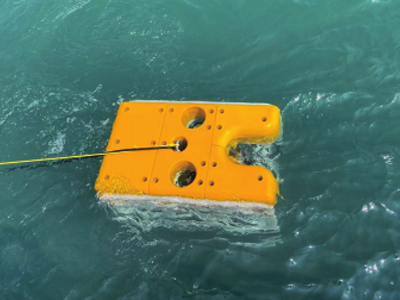
⑹ 海神6000型深海AUV水下機(jī)器人
該型AUV應(yīng)用于深遠(yuǎn)海搜救型AUV,是我國首個用于深遠(yuǎn)海搜救的AUV水下機(jī)器人,主要參數(shù)有:最大工作深度6000m,直徑880mm,長度7.5m,最大航速5kn,最大續(xù)航力24h。根據(jù)任務(wù)需要搭載了USBL、飛機(jī)黑匣子搜索聲吶陣、深海測深側(cè)掃聲吶、水下相機(jī)、CTD、深海聲通機(jī)、前視聲吶等多個探測設(shè)備。

▲海神6000回收
二、深海AUV關(guān)鍵技術(shù)
深海AUV的研制需要突破許多技術(shù),而其最關(guān)鍵的技術(shù)主要有動力能源技術(shù)、導(dǎo)航定位技術(shù)、水下通信技術(shù)、自主任務(wù)控制技術(shù)。
1動力能源技術(shù)
由于深海AUV水下機(jī)器人需要工作在深海水下的特殊環(huán)境,因此,對動力能源的要求較高,需要能源密度高、安全性好、易于維護(hù)、成本低、甚至需要電池承受深海水壓等條件,因此,通常選擇電池作為動力能源的載體。通常,在深海AUV中使用的電池主要有鉛酸電池、銀鋅電池、鋰離子電池,而目前,深海AUV中使用的鋰離子電池居多。
鋰離子電池中的二次電池的比能量和能量密度分別達(dá)到鉛酸電池和鎳鎘電池的4倍和2倍以上,壽命是銀鋅電池的130倍,已成為目前國外應(yīng)用的主流,美國的REMUS系列AUV均采用了二次鋰離子電池。
2導(dǎo)航定位技術(shù)
由于深海AUV水下機(jī)器人在水下航行過程中,普遍采用慣導(dǎo)與計(jì)程儀組合的方式進(jìn)行導(dǎo)航,而深海AUV無法實(shí)時浮出水面對慣導(dǎo)進(jìn)行校準(zhǔn),因此,導(dǎo)航定位將是深海AUV的關(guān)鍵技術(shù)之一。目前國外一些研發(fā)機(jī)構(gòu)采用其他設(shè)備輔助定位的方式,例如挪威的HUGIN系列采用了慣性導(dǎo)航裝置,多普勒計(jì)程儀的組合下,利用水下超短基線定位裝置進(jìn)行輔助定位的組合導(dǎo)航,其導(dǎo)航精度令人滿意。
隨著導(dǎo)航定位技術(shù)的不斷深入研究,未來的深海AUV水下機(jī)器人慣性導(dǎo)航裝置不斷提高純慣性導(dǎo)航精度使得深海AUV的導(dǎo)航定位精度將提升一個數(shù)量級,并有望不依賴多普勒計(jì)程儀和衛(wèi)星定位裝置便可達(dá)到導(dǎo)航精度要求。
3水下通信技術(shù)
深海AUV水下機(jī)器人在水下作業(yè)過程中,唯一可以與工作母船進(jìn)行通信的方式是水聲通信的方式;而水聲通信傳輸速率低,通信可靠性受到海洋環(huán)境影響較大,信號衰減嚴(yán)重,因此,各個國家均投入大量人力物力研究該領(lǐng)域技術(shù)。目前典型的該領(lǐng)域技術(shù)發(fā)展方向包括水聲信道編碼技術(shù)、水聲擴(kuò)頻技術(shù)等,并逐步改善水聲通信的質(zhì)量。
此外,水下無人航行器的通信組網(wǎng)技術(shù)也是各國家研究的重點(diǎn),但目前成功應(yīng)用于產(chǎn)品的只有少數(shù)國家。
4自主任務(wù)控制技術(shù)
自主任務(wù)控制技術(shù)既是深海AUV水下機(jī)器人的關(guān)鍵技術(shù),也是深海AUV水下機(jī)器人的核心技術(shù),該技術(shù)包括對作業(yè)任務(wù)的管理,智能規(guī)劃,自主狀態(tài)檢查和自主故障處理,自主避開障礙物以及自主航行。自主任務(wù)控制技術(shù)未來將朝著智能分析任務(wù),并根據(jù)任務(wù)自主規(guī)劃航路,根據(jù)當(dāng)前的航行狀態(tài)和設(shè)備狀態(tài),自主優(yōu)化作業(yè)的時間和路徑。
三、深海AUV的發(fā)展趨勢
從上述國內(nèi)外深海AUV水下機(jī)器人的發(fā)展?fàn)顩r,可以看出深海AUV水下機(jī)器人的發(fā)展正向著小型化、智能化、快速投送、快速反應(yīng)的方向發(fā)展,其發(fā)展大致分為3個階段:
第1個階段, 研制可以在深海水下航行的AUV水下機(jī)器人,解決深海水下航行所需的關(guān)鍵技術(shù),例如大深度耐壓艙的設(shè)計(jì)加工技術(shù),耐壓密封技術(shù),以及水下航行控制技術(shù)。
第2個階段,在第1個階段的基礎(chǔ)上研發(fā)負(fù)載裝備技術(shù),并對探測、目標(biāo)識別、布放和回收對接等關(guān)鍵技術(shù)進(jìn)行深入研究,并最終形成面向?qū)崙?zhàn)應(yīng)用的,成熟度高的產(chǎn)品。
第3階段,優(yōu)化深海AUV水下機(jī)器人。研制小體積、小重量、使用便捷、智能化程度高、使用可靠、水下作業(yè)極對插入電解液模擬,難以達(dá)到最優(yōu),采用多個小型電極對并聯(lián),并利用多目標(biāo)規(guī)劃方法優(yōu)化電極和模擬裝置尺寸,可以高效模擬電極掃雷具大型多股電極-海水負(fù)載。
模擬負(fù)載在通電過程中會產(chǎn)生大量熱量,需要考慮散熱問題,受篇幅所限,文中對這一問題未進(jìn)行探討,需要后續(xù)進(jìn)一步研究。
來源:《數(shù)字海洋與水下攻防》
轉(zhuǎn)自:溪流之海洋人生

