海洋無人系統仿真訓練平臺采用可擴展、模塊化的設計思路,基于海洋無人系統(AUV、ROV、USV等)的使用流程及其實際工作中的信息流傳遞,結合相關人員使用操作訓練需求,構建了以數字仿真模型為支撐,能夠有效模擬單個/集群海洋無人系統在海洋環境中的動力學/運動學特性、傳感器載荷的使用、環境信息的交互以及海洋作業過程。
海洋無人系統仿真訓練平臺采用可擴展、模塊化的設計思路,基于海洋無人系統(AUV、ROV、USV等)的使用流程及其實際工作中的信息流傳遞,結合相關人員使用操作訓練需求,構建了以數字仿真模型為支撐,能夠有效模擬單個/集群海洋無人系統在海洋環境中的動力學/運動學特性、傳感器載荷的使用、環境信息的交互以及海洋作業過程。

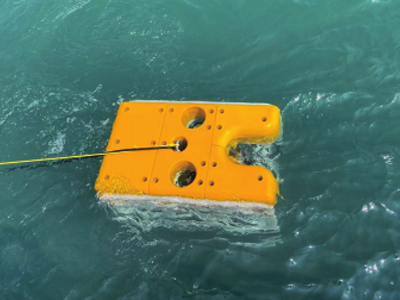
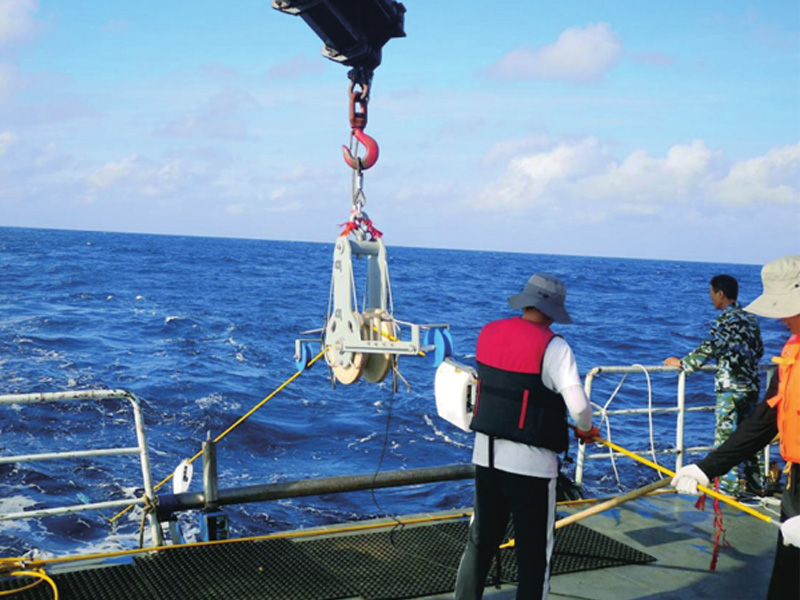
專門面向海洋無人系統設計和開發,海洋無人系統包括AUV、ROV、USvV等,支持電子海圖任務配置,能夠有效模擬海洋無人系統的使用流程及其實際工作中的信息流傳遞。

平臺包含海洋無人系統平臺模型、傳感器模型等,并融合環境效應,使得仿真模擬更接近真實,并可通過插件和參數配置方式擴展其他實體模型,支持二次開發。

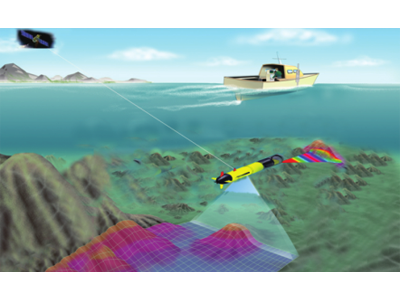
平臺集成3D引擎,并能夠逼真地模擬海面海浪、海底地形、水下霧效等,并以可視化方式顯示海洋無人系統平臺運動姿態、傳感器工作過程及其探測數據等。

能夠有效模擬海洋無人系統集群在海洋中的編隊、搜探和圍捕等協同運動。

軍事推演
科研仿真
模擬訓練
應用演示